About
Let me introduce myself.
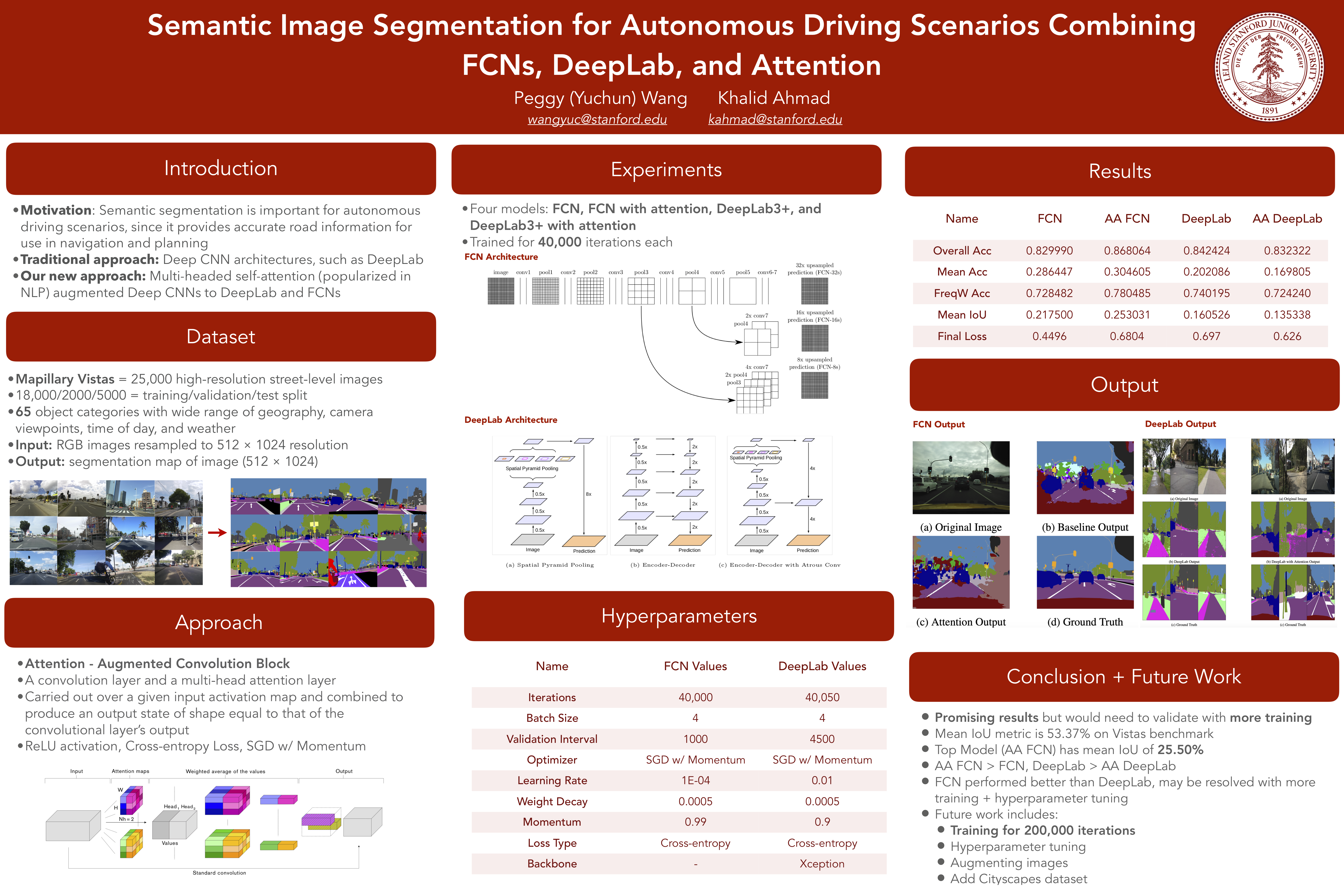
I am a recent graduate (B.S. and M.S. '20) from Stanford University in Computer Science: Artificial Intelligence Track. I'm interested in autonomous driving, robotics, and artificial intelligence.
Profile
I currently work full time as a software engineer at Facebook. I'm interested in autonomous driving, robotics, and artificial intelligence projects. Feel free to contact me at peggy.yuchun.wang@cs.stanford.edu !
- Full Name: Peggy (Yuchun) Wang
- Education: Stanford University M.S. Candidate '20 | Computer Science: Artificial Intelligence Track Stanford University B.S. Candidate '20 | Computer Science: Artificial Intelligence Track
- Website: https://peggyyuchunwang.github.io/
- Email: peggy.yuchun.wang@cs.stanford.edu
Skills
I have a wide variety of skills spanning Artificial Intelligence, Robotics, Computer Science, Machine Learning, and Computer Vision. I am particularly interested in Robot Perception and Decision Making. Below are some highlights of my technical skills.